デジタルツインである電子カム
電子カムのデジタルツイン
電子カムの思想は,デジタルツインです
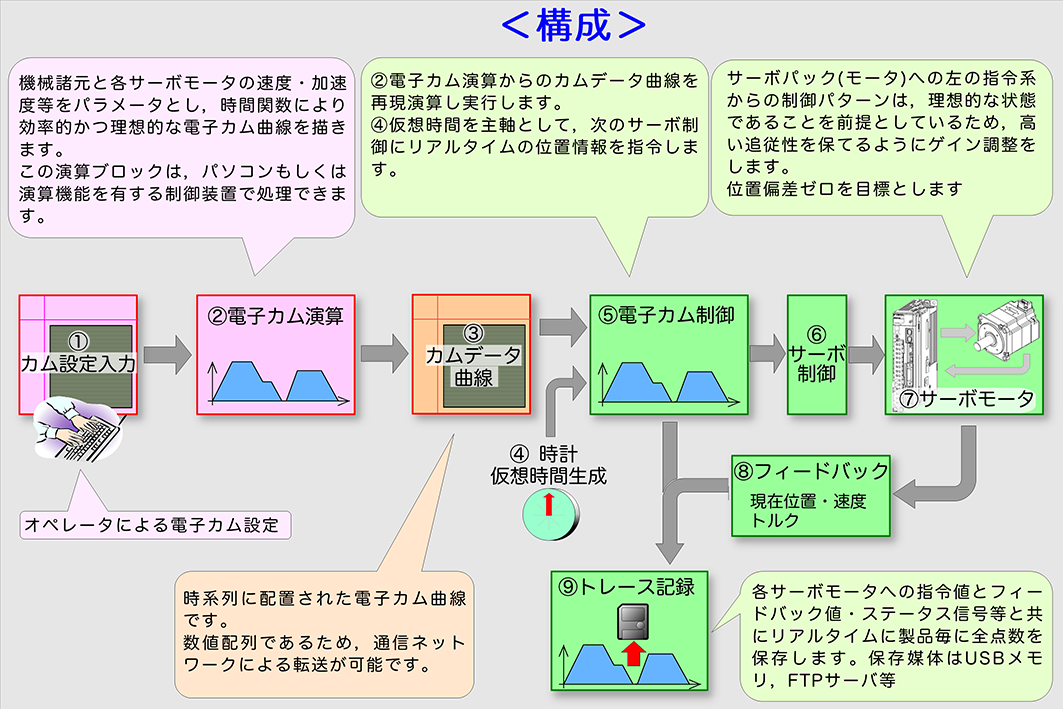
- 事前演算
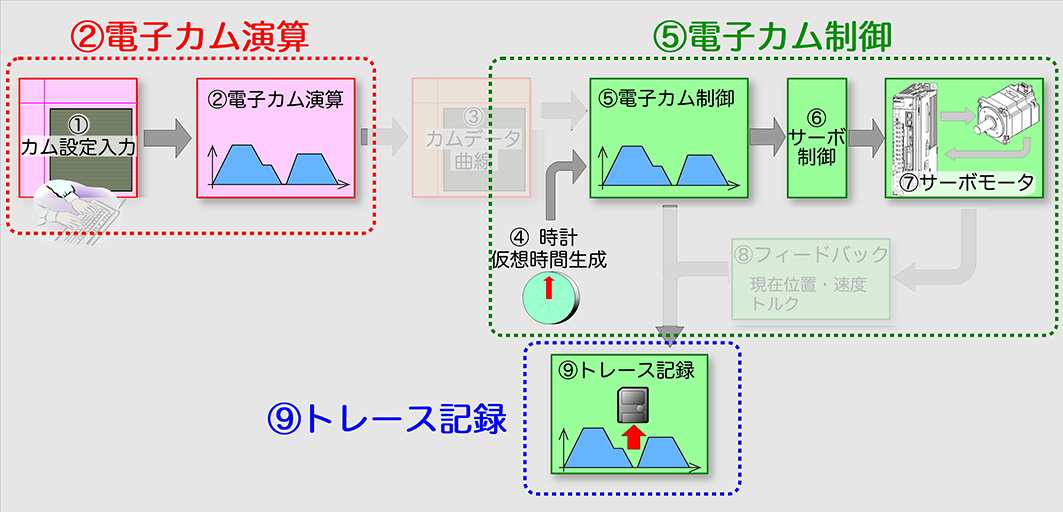
「②電子カム演算」では,①カム設定入力を機械系のスペックである許容速度及び加速度と,サーボモータの許容速度及び加減速度から,電子カム演算を実行し理想な「③カムデータ曲線」を時系列的に生成します。 - リアル演算制御
「⑤電子カム制御」では,前もって②電子カム演算において理想的なカムデータ曲線が完成しているため,仮想時間を主軸(横軸))として,サーボへ指令を出力します。 - 事前演算とリアル演算制御との検証
「②電子カム演算」での事前サーボパターンと,「⑤電子カム制御」でのリアルサーボパターンとは同一となるはずです,もし事前検討と異なった場合には,「⑨トレース記録」によって記録されたサーボ波形を時系列的に検討して,問題点の検討を行います。問題点が発見されれば「①カム設定入力」にもどり修正を行います。 - 繰り返し運転での比較
電子カムは,時間軸上に・各動作を時系列に・理論的に・並べることを前提とします,それ故にリアル制御では,繰り返し運転毎には同じ結果を出し続けるはずです。さらにサーボの追従性を高く保っているため,運転毎に比較した差異はトルク変動しか発生しません。もしトラブル等で異なれば,時間軸上に並べて比較すれば,問題点の発見は容易になります。 - 電子カムの意義
一般的に制御設計をする場合においては,時間軸上に順に理論的に正確に並べるのはけっこうめんどくさい作業となります,そのためその都度の動作を優先して設計しまいがちです,その結果不具合が発生するとなかなか検証できなく苦しむ場合があります。
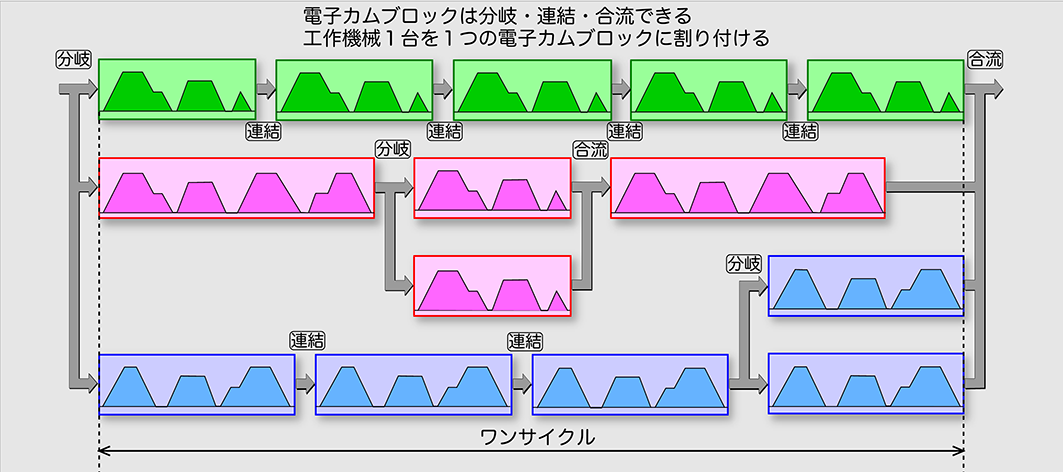
電子カムは組み合わせることができる
1つの電子カムブロック(小型工作機械1台を割り付)を分岐・連結・合流することにより更に大きな電子カム構成を容易に生成できます。分岐・連結・合流の処理に曖昧さを設けなければ,合成後に大きな電子カム構成となっても正確な電子カム工程を実現できます。
上記考え方は,下記の弊社製品に反映しています
- 貴社の状況に合わせたエンジニアリング業務をご提供いたします
- FAX 078-982-8352(24時間受付)

©Copyright 2025 株式会社モーションシステム All Rights Reserved.